Unsteady actuator case - 2D
In this example, an unsteady inlet velocity profile at encounters a wind turbine blade in a wall-less domain. The blade is modeled as a uniform body force on a thin rectangle.
Packages
A Makie plotting backend is needed for plotting. GLMakie creates an interactive window (useful for real-time plotting), but does not work when building this example on GitHub. CairoMakie makes high-quality static vector-graphics plots.
using CairoMakie
using IncompressibleNavierStokesSetup
A 2D grid is a Cartesian product of two vectors
n = 40
x = LinRange(0.0, 10.0, 5n + 1), LinRange(-2.0, 2.0, 2n + 1)
plotgrid(x...; figure = (; size = (600, 300)))
Boundary conditions
inflow(dim, x, y, t) = sinpi(sinpi(t / 6) / 6 + (dim == 1) / 2)
boundary_conditions = ((DirichletBC(inflow), PressureBC()), (PressureBC(), PressureBC()))((DirichletBC{typeof(Main.inflow)}(Main.inflow), PressureBC()), (PressureBC(), PressureBC()))Actuator body force: A thrust coefficient Cₜ distributed over a thin rectangle
xc, yc = 2.0, 0.0 # Disk center
D = 1.0 # Disk diameter
δ = 0.11 # Disk thickness
C = 0.2 # Thrust coefficient
c = C / (D * δ) # Normalize
inside(x, y) = abs(x - xc) ≤ δ / 2 && abs(y - yc) ≤ D / 2
bodyforce(dim, x, y, t) = -c * (dim == 1) * inside(x, y)bodyforce (generic function with 1 method)Build setup
setup = Setup(; x, Re = 100.0, boundary_conditions, bodyforce, issteadybodyforce = true);Initial conditions (extend inflow)
ustart = velocityfield(setup, (dim, x, y) -> inflow(dim, x, y, 0.0))202×83×2 Array{Float64, 3}:
[:, :, 1] =
1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 … 1.0 1.0 1.0 1.0 1.0 1.0 1.0
0.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
0.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
0.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
0.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
0.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 … 1.0 1.0 1.0 1.0 1.0 1.0 1.0
0.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
0.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
0.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
0.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
⋮ ⋮ ⋱ ⋮
0.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
0.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
0.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 … 1.0 1.0 1.0 1.0 1.0 1.0 1.0
0.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
0.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
0.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
0.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
0.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 … 1.0 1.0 1.0 1.0 1.0 1.0 1.0
0.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0
[:, :, 2] =
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 … 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 … 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
⋮ ⋮ ⋱ ⋮
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 … 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 … 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0Solve unsteady problem
state, outputs = solve_unsteady(;
setup,
ustart,
tlims = (0.0, 12.0),
method = RKMethods.RK44P2(),
Δt = 0.05,
processors = (
rtp = realtimeplotter(; setup, size = (600, 300), nupdate = 5),
log = timelogger(; nupdate = 24),
),
);[ Info: t = 1.2 Δt = 0.05 umax = 1.1 itertime = 0.11
[ Info: t = 2.4 Δt = 0.05 umax = 1.1 itertime = 0.039
[ Info: t = 3.6 Δt = 0.05 umax = 1.1 itertime = 0.0098
[ Info: t = 4.8 Δt = 0.05 umax = 1.1 itertime = 0.0096
[ Info: t = 6 Δt = 0.05 umax = 1.1 itertime = 0.0087
[ Info: t = 7.2 Δt = 0.05 umax = 1.1 itertime = 0.0087
[ Info: t = 8.4 Δt = 0.05 umax = 1.1 itertime = 0.0086
[ Info: t = 9.6 Δt = 0.05 umax = 1.1 itertime = 0.0088
[ Info: t = 10.8 Δt = 0.05 umax = 1.1 itertime = 0.0089
[ Info: t = 12 Δt = 0.05 umax = 1.1 itertime = 0.0087Post-process
We create a box to visualize the actuator.
box = (
[xc - δ / 2, xc - δ / 2, xc + δ / 2, xc + δ / 2, xc - δ / 2],
[yc + D / 2, yc - D / 2, yc - D / 2, yc + D / 2, yc + D / 2],
)([1.945, 1.945, 2.055, 2.055, 1.945], [0.5, -0.5, -0.5, 0.5, 0.5])Plot pressure
fig = fieldplot(state; setup, size = (600, 300), fieldname = :pressure)
lines!(box...; color = :red)
fig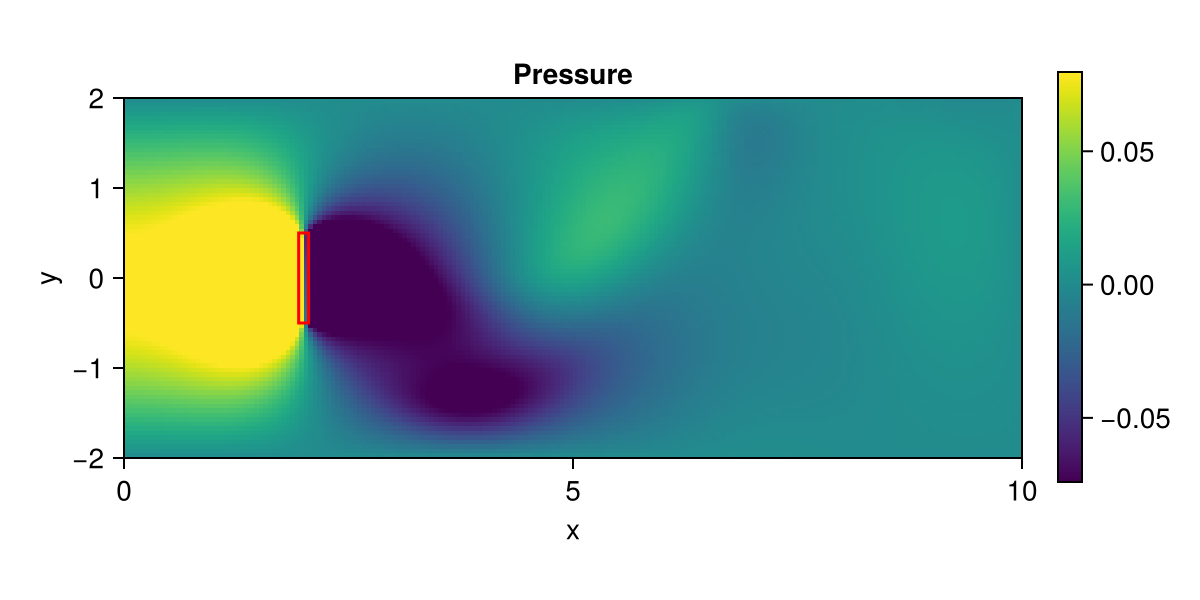
Plot velocity
fig = fieldplot(state; setup, size = (600, 300), fieldname = :velocitynorm)
lines!(box...; color = :red)
fig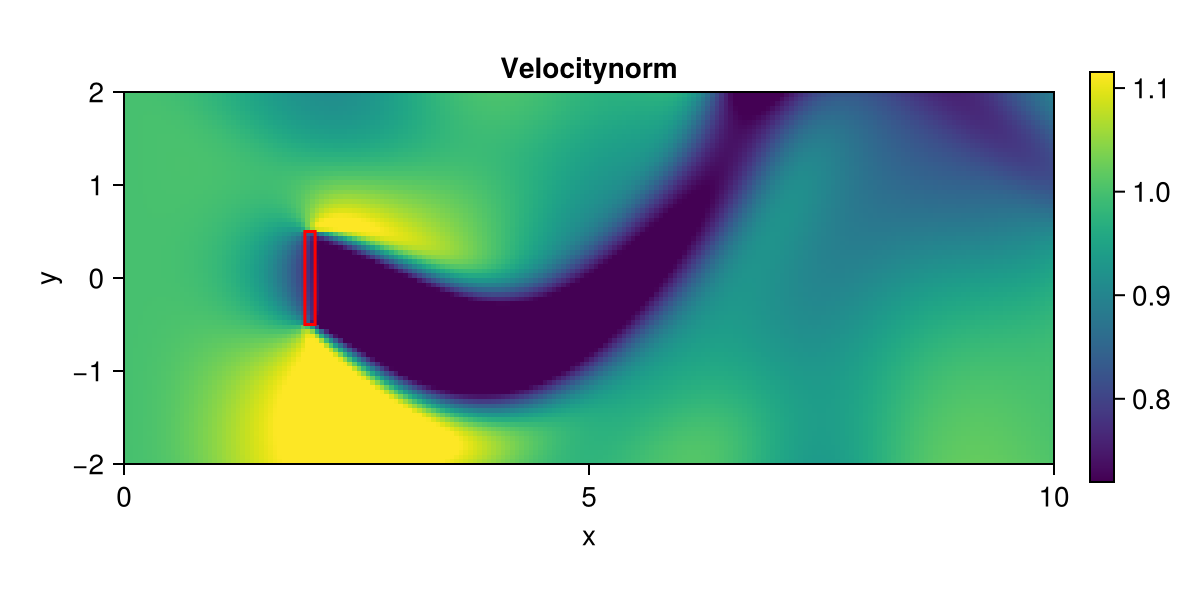
Plot vorticity
fig = fieldplot(state; setup, size = (600, 300), fieldname = :vorticity)
lines!(box...; color = :red)
fig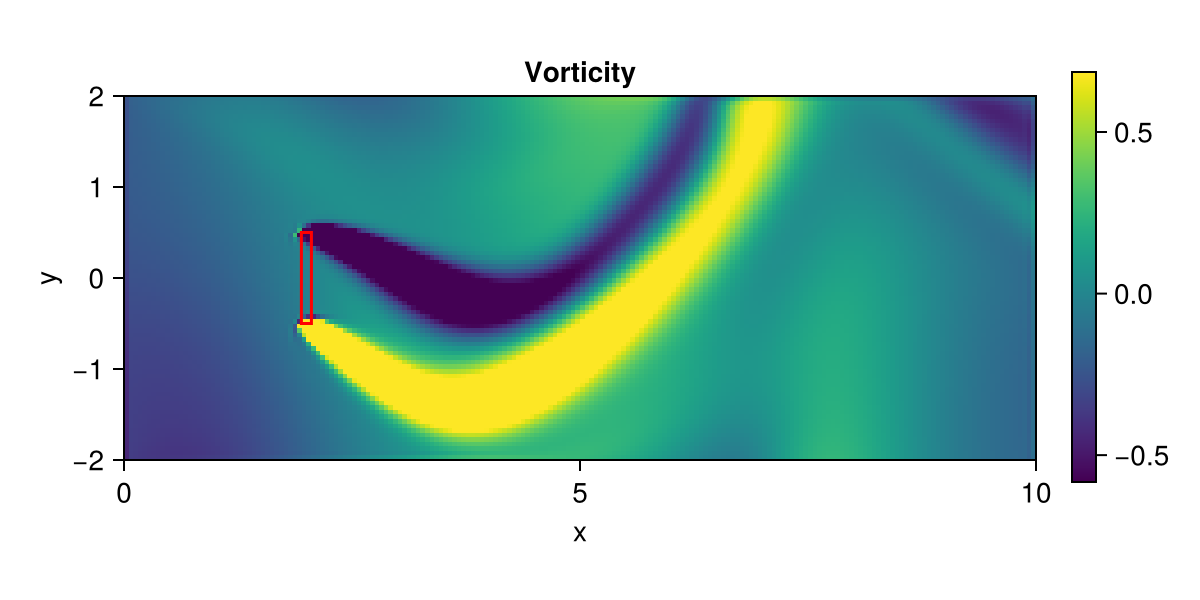
Copy-pasteable code
Below is the full code for this example stripped of comments and output.
using GLMakie
using IncompressibleNavierStokes
n = 40
x = LinRange(0.0, 10.0, 5n + 1), LinRange(-2.0, 2.0, 2n + 1)
plotgrid(x...; figure = (; size = (600, 300)))
inflow(dim, x, y, t) = sinpi(sinpi(t / 6) / 6 + (dim == 1) / 2)
boundary_conditions = ((DirichletBC(inflow), PressureBC()), (PressureBC(), PressureBC()))
xc, yc = 2.0, 0.0 # Disk center
D = 1.0 # Disk diameter
δ = 0.11 # Disk thickness
C = 0.2 # Thrust coefficient
c = C / (D * δ) # Normalize
inside(x, y) = abs(x - xc) ≤ δ / 2 && abs(y - yc) ≤ D / 2
bodyforce(dim, x, y, t) = -c * (dim == 1) * inside(x, y)
setup = Setup(; x, Re = 100.0, boundary_conditions, bodyforce, issteadybodyforce = true);
ustart = velocityfield(setup, (dim, x, y) -> inflow(dim, x, y, 0.0))
state, outputs = solve_unsteady(;
setup,
ustart,
tlims = (0.0, 12.0),
method = RKMethods.RK44P2(),
Δt = 0.05,
processors = (
rtp = realtimeplotter(; setup, size = (600, 300), nupdate = 5),
log = timelogger(; nupdate = 24),
),
);
box = (
[xc - δ / 2, xc - δ / 2, xc + δ / 2, xc + δ / 2, xc - δ / 2],
[yc + D / 2, yc - D / 2, yc - D / 2, yc + D / 2, yc + D / 2],
)
fig = fieldplot(state; setup, size = (600, 300), fieldname = :pressure)
lines!(box...; color = :red)
fig
fig = fieldplot(state; setup, size = (600, 300), fieldname = :velocitynorm)
lines!(box...; color = :red)
fig
fig = fieldplot(state; setup, size = (600, 300), fieldname = :vorticity)
lines!(box...; color = :red)
figThis page was generated using Literate.jl.